Graduation Project
相关链接:
LIO-SAM source code repositories
LIDAR-DRIVER - HesaiLidar_General_ROS
content
一. 测试条件
-
ROS版本 : Noetic
- 系统 : Ubuntu 20.04 Jetson AGX Orin
- 激光雷达 : Hesai-Pandar-XT-16
- IMU : WHEELTEC-N100
- RTK : WHEELTEC-G70
二. 项目结构
1.文件夹结构
核心文件目录如下: 包含两个部分:
- graduation_slam_benchmark : 激光雷达建图定位算法,包含多种算法测试以及实际部署的代码与功能包
- Photovoltaic_robot_simulator : 机器人仿真代码与功能包
./Work_space
├── graduation_slam_benchmark
│ ├── build
│ ├── datasheet
│ ├── devel
│ ├── log
│ ├── logs
│ ├── scripts
│ └── src
├── Photovoltaic_robot_simulator
│ ├── assets
│ ├── build
│ ├── datasheets
│ ├── devel
│ ├── logs
│ ├── README.md
│ ├── scripts
│ └── src
三. 项目部署
1.仿真部分
核心文件目录如下:
./src
├── hardware_driver
│ └── livox_ros_driver
├── robot_simulator
│ ├── robot_control # 机器人控制功能包
│ └── robot_description # 机器人描述文件
├── slam_algorithm
│ ├── ego-planner # ego-planner算法
│ ├── FAST_LIO
│ ├── FAST_LIO_LOCALIZATION # FAST_LIO_LOCALIZATION 重定位算法
│ └── FAST_LIO_SAM # FAST_LIO_SAM 定位建图算法
└── velodyne_simulator
运行指令
为方便实际运行常用的启动指令都写在对应ROS工作空间下的 /script 文件夹中
启动机器人人仿真
roslaunch robot_description gazebo.launch
启动机器人控制
此时机器人接受键盘控制
# move control
roslaunch robot_control velocity_controller.launch
开启键盘控制
键盘控制机器人移动
# start to control robot by Keyboard
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
开启激光雷达建图
#算法运行
roslaunch fast_lio_sam mapping_solar_robot.launch
#开启可视化
rosrun rviz rviz -d $(rospack find fast_lio_sam)/rviz_cfg/loam_livox.rviz
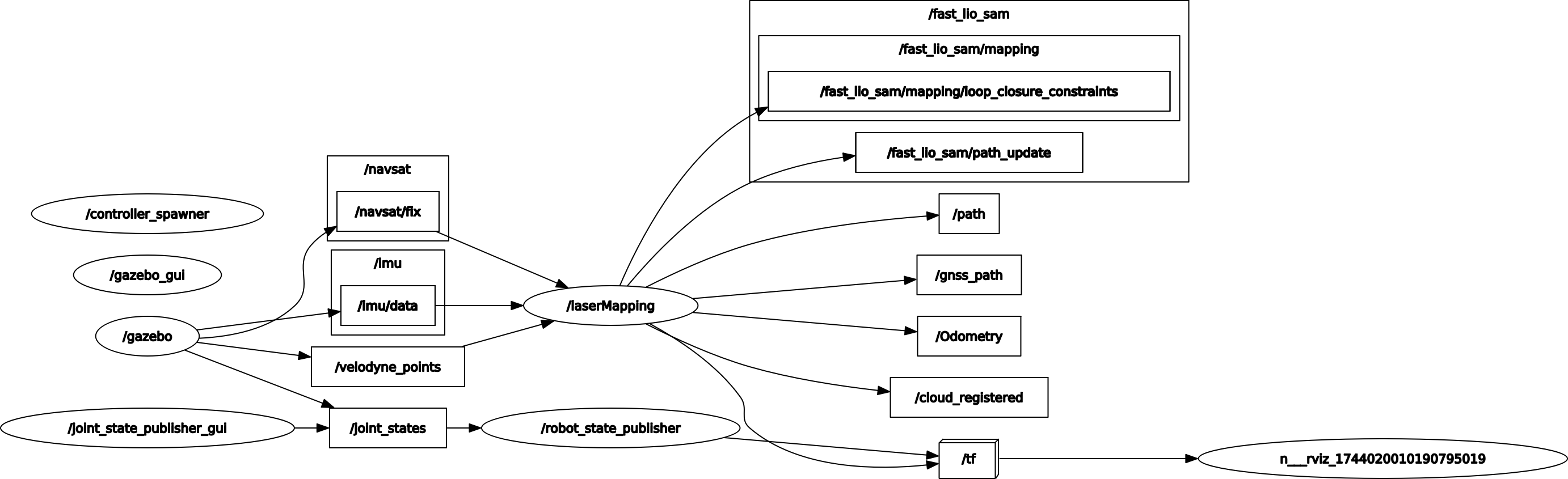
系统节点树
实际效果演示
重定位模块
开启重定位
#reference
roslaunch fast_lio_localization localization_velodyne.launch
2.实际部署部分
核心文件目录如下:
./src/
├── data_perception # 数据处理
│ ├── hesai_to_velodyne # 激光雷达预处理
│ ├── LiDAR_IMU_Init # IMU-LiDAR外参标定
│ └── odom_to_kitti # 里程计转kitti格式
├── hardware_driver # 传感器驱动
│ ├── fdilink_ahrs
│ ├── gnss
│ ├── HesaiLidar_General_ROS
│ ├── livox_ros_driver
│ └── usb_cam
└── localization # 定位建图算法
├── A-LOAM
├── FAST_LIO
├── FAST_LIO_SAM # 主要使用的算法
├── LeGO-LOAM
└── LIO-SAM
实际部署部分启动指令如下:
为方便实际运行常用的启动指令都写在对应ROS工作空间下的 /script 文件夹中
一键启动脚本:
graduation_slam_benchmark 工作空间下的 /script 文件夹中
./script/start_slam_system.sh
GPS驱动
# 1. 启动 GPS 驱动节点
source devel/setup.bash && roslaunch wheeltec_gps_driver wheeltec_nmea_driver.launch
AHRS驱动
# 2. 启动 AHRS 驱动节点
source devel/setup.bash && sudo chmod 666 /dev/ttyUSB0 && roslaunch fdilink_ahrs ahrs_data.launch
启动 PTP 时间同步服务
# 3. 启动 PTP 时间同步服务(需要 sudo 权限)
sudo ptp4l -m -4 -i eth0 -S
激光雷达驱动
# 4. 启动 Hesai 激光雷达驱动
source devel/setup.bash && roslaunch hesai_lidar hesai_lidar.launch
FAST-LIO-SAM 算法
# 5. 启动 FAST-LIO-SAM 算法
source devel/setup.bash && roslaunch fast_lio_sam mapping_velodyne16_lio_sam_parking_dataset.launch
效果演示: